K 近邻 (KNN) 与基于实例的学习¶
1 背景与动机¶
传统机器学习模型多采用 模型假设 + 参数估计 的思路(如线性回归、MAP、ML、朴素贝叶斯等)。但有没有一种方法不依赖于模型假设?
人们通过记忆和类比来推理学习——"思考即回忆" (Thinking is reminding, making analogies),所谓 近朱者赤,近墨者黑 。基于实例的学习正是这种思想的体现:
2 参数化与非参数化¶
机器学习方法可以分为 参数化 (Parametric) 和 非参数化 (Non-parametric) 两种:
- 参数化 :
- 设定一个特定的函数形式。
- 优点:简单,容易估计和解释。
- 缺点:可能存在很大的 偏置 (bias)——实际的数据分布可能不遵循假设的分布。
- 非参数化 :
- 分布或密度的估计是 数据驱动 (data-driven) 的。
- 需要事先对函数形式作的假设相对更少。
基于实例的学习(Instance-based Learning, IBL)是非参数化方法的典型代表,也称为基于记忆的学习 (Memory-Based Learning)、基于样例的学习 (Case-Based Learning)、基于相似度的学习 (Similarity-Based Learning)。
- 核心思想:通过比较未知数据和已知数据的 相似度 (Similarity),来将其归为已有的类别。
- 特点:
- 无需构建模型,仅存储所有训练样例。
- 直到有 新样例 需要分类,才开始进行处理(即 延迟学习 ,Lazy Learning)。
定义 1(基于实例的概念表示)
一个概念 \(c_i\) 可以表示为:
- 样例的集合 \(c_i = \{e_{i1}, e_{i2}, \dots\}\)
- 一个相似度估计函数 \(f\)
- 一个阈值 \(\theta\)
一个实例 \(a\) 属于概念 \(c_i\),当 \(a\) 和 \(c_i\) 中的某些 \(e_j\) 相似,并且满足:
这里, 相似度的常用估计是距离 。每个数据都有各种 属性 ,表现为数值向量。通过比较不同数据的各个属性,可以计算它们之间的 距离 。
3 最近邻与 K 近邻 (KNN)¶
3.1 1-NN (最近邻)¶
1-NN (1 Nearest Neighbor) 即找到距离最近的一个点,将其 标签 作为预测值。

例 1:信用评分 (1-NN)
给定以下训练数据(特征:\(L\) = 延迟还款次数/年,\(R\) = 收入/花销比;标签:G = 好,P = 坏),对新样例使用缩放距离找到最近邻并预测其类别。
| name | \(L\) | \(R\) | G/P |
|---|---|---|---|
| A | 0 | 1.2 | G |
| B | 25 | 0.4 | P |
| C | 5 | 0.7 | G |
| D | 20 | 0.8 | P |
| E | 30 | 0.85 | P |
| F | 11 | 1.2 | G |
| G | 7 | 1.15 | G |
| H | 15 | 0.8 | P |
对于新样例 \(I(6, 1.15)\)、\(J(22, 0.45)\)、\(K(15, 1.2)\),使用缩放距离:
分别找到最近邻并预测其类别。
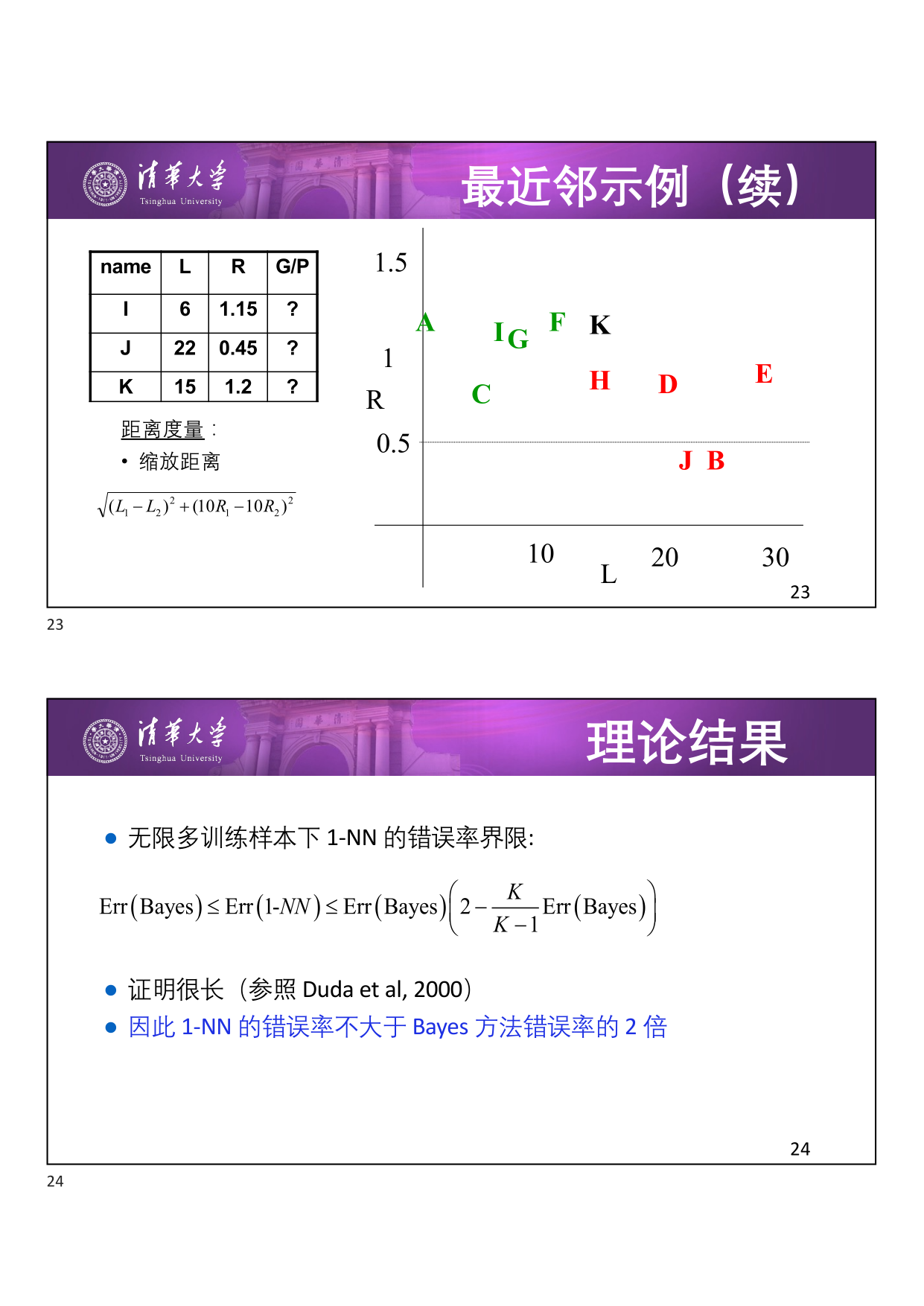
定理 1(1-NN 的错误率界限)
在无限多训练样本下,1-NN 的错误率 \(R_{\text{1NN}}\) 不大于 Bayes 方法错误率 \(R_{\text{Bayes}}\) 的 2 倍:
其中 \(c\) 为类别数。证明参照 Duda et al, 2000。
Voronoi 图(维诺图)
最近邻(1-NN)的决策边界可以通过 Voronoi Diagram (沃罗诺伊图) 来解释。
对于任意欧氏空间的离散点集合 \(S\),以及几乎所有的点 \(x\),\(S\) 中一定有一个与 \(x\) 最接近的点。边界上的点可能与两个或多个点距离相等。
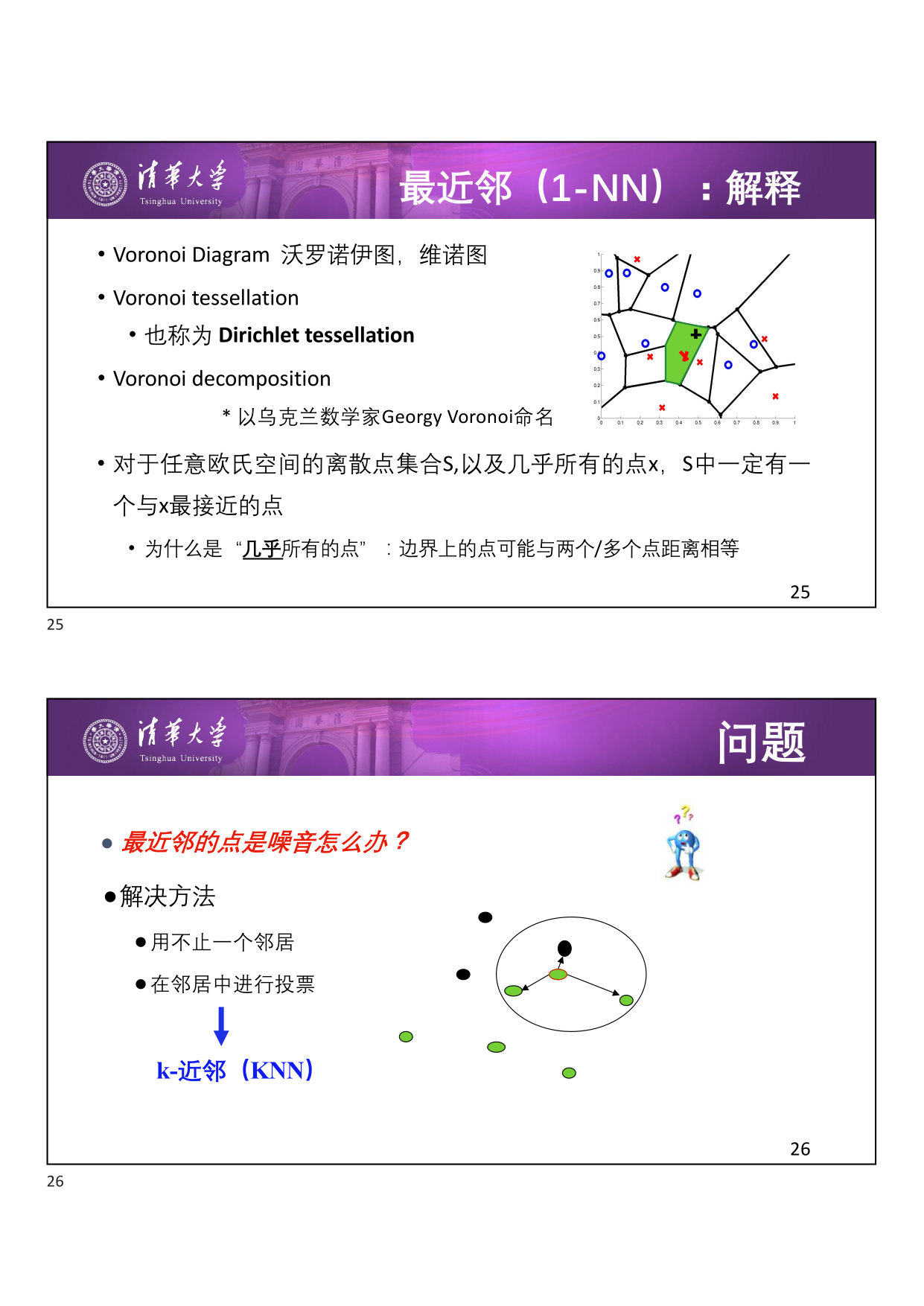
问题 :如果最近邻的点是噪音怎么办?只选取一个邻居评判,随机性太高,可能预测出错。
3.2 K-NN 基本思想¶
为了解决噪音问题, K-近邻 (K-Nearest Neighbor, KNN) 算法的核心思想是:
- 使用不止一个邻居的标签。
- 选取前 \(k\) 个最近的邻居进行 投票 。
例 2:信用评分 (3-NN)
使用 \(k=3\),以 David \((37, 50K, 2)\) 为待分类样例,计算欧氏距离:
| 顾客 | 年龄 | 收入 (K) | 卡片数 | 结果 | 距 David 的距离 |
|---|---|---|---|---|---|
| John | 35 | 35 | 3 | No | \(\sqrt{(35-37)^2+(35-50)^2+(3-2)^2} = 15.16\) |
| Mary | 22 | 50 | 2 | Yes | \(\sqrt{(22-37)^2+(50-50)^2+(2-2)^2} = 15\) |
| Hannah | 63 | 200 | 1 | No | \(\sqrt{(63-37)^2+(200-50)^2+(1-2)^2} = 152.23\) |
| Tom | 59 | 170 | 1 | No | \(\sqrt{(59-37)^2+(170-50)^2+(1-2)^2} = 122\) |
| Nellie | 25 | 40 | 4 | Yes | \(\sqrt{(25-37)^2+(40-50)^2+(4-2)^2} = 15.74\) |
3 个最近邻为 Mary (Yes)、John (No)、Nellie (Yes),投票结果为 Yes 。

注意:距离的尺度问题
在上例中,收入的取值范围远大于年龄和卡片数,距离计算会被收入主导。这说明了 归一化 的必要性(见第 5 节)。
4 距离度量¶
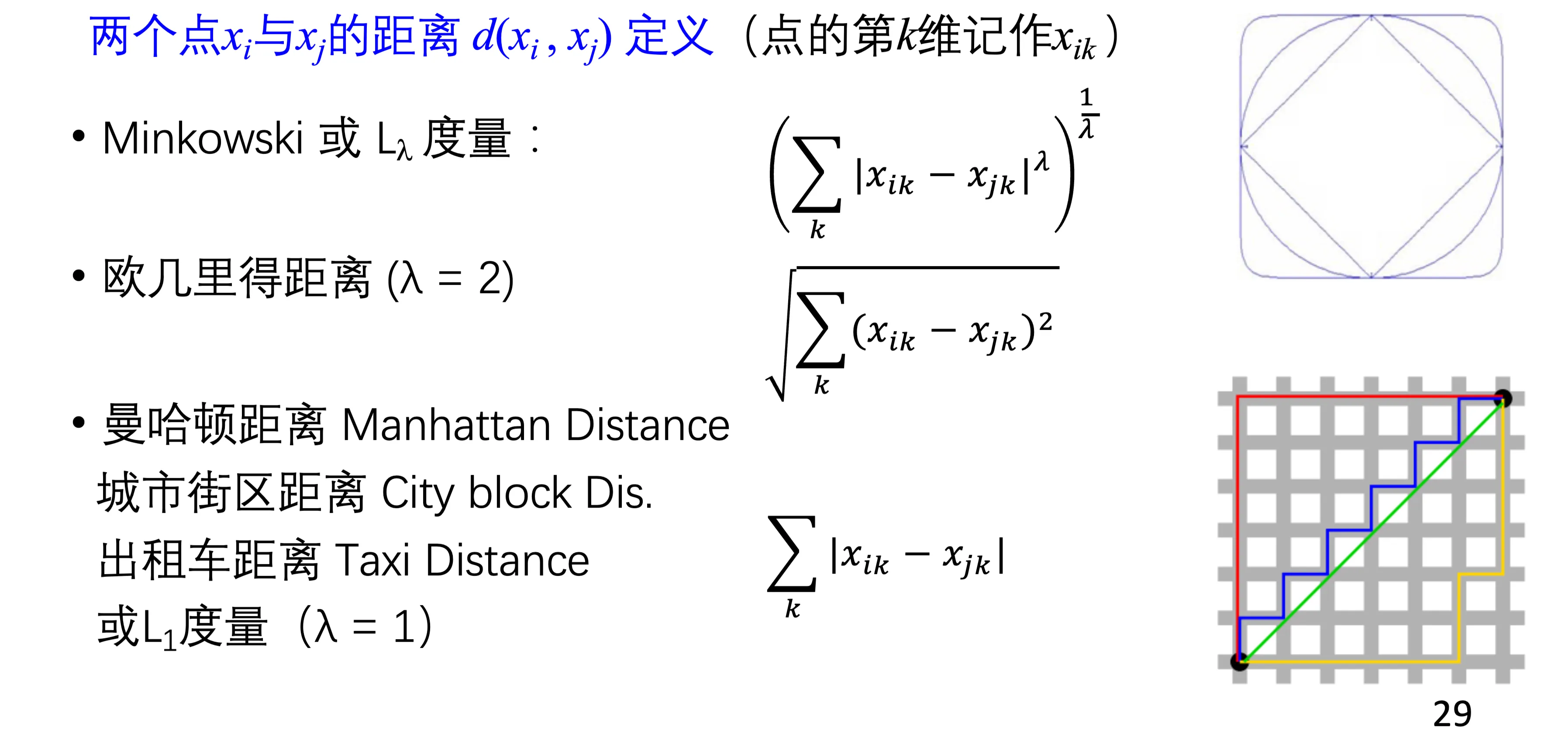
两个点 \(x_i\) 与 \(x_j\) 的距离 \(d(x_i, x_j)\) 有多种定义方式(点的第 \(k\) 维记作 \(x_{ik}\)):
Minkowski 或 \(L_p\) 度量 :
- \(p=2\) 时为 欧几里得距离 (Euclidean Distance):\(\sqrt{\sum_k (x_{ik} - x_{jk})^2}\)
- \(p=1\) 时为 曼哈顿距离 (Manhattan Distance,城市街区距离 / 出租车距离):\(\sum_k |x_{ik} - x_{jk}|\)
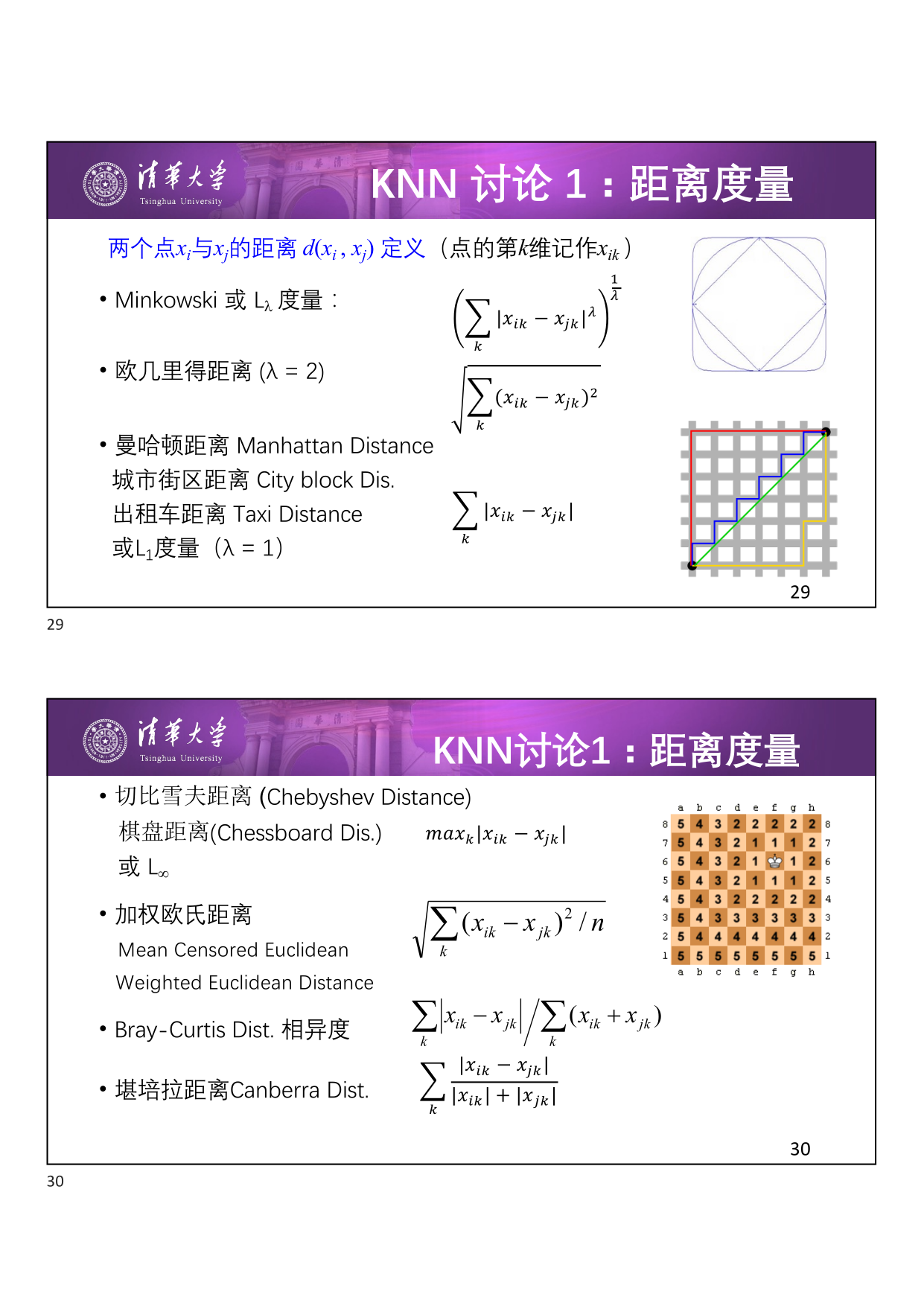
- \(p \to \infty\) 时为 切比雪夫距离 (Chebyshev Distance,棋盘距离):\(\max_k |x_{ik} - x_{jk}|\)
其他距离度量 :
- 加权欧氏距离 (Weighted Euclidean Distance):\(\sqrt{\sum_k \frac{(x_{ik} - x_{jk})^2}{\sigma_k^2}}\)
- Bray-Curtis 距离 (相异度):\(\frac{\sum_k |x_{ik} - x_{jk}|}{\sum_k (x_{ik} + x_{jk})}\)
- Canberra 距离 :\(\sum_k \frac{|x_{ik} - x_{jk}|}{|x_{ik}| + |x_{jk}|}\)
5 属性的处理¶
由于不同属性数值的取值范围可能差异很大(例如年龄在 0-100 之间,而收入在 10000-100000 之间),距离的计算可能被某些取值特别大的属性所 支配 ,因此需要进行处理。
5.1 数值归一化¶
需要对各种属性进行 数值归一化 (Normalization),将数值映射到相近的区间(如 \([0, 1]\))。常用的方法有:
- Min-Max 归一化 :\(x_i' = \frac{x_i - \min}{\max - \min}\)
- Log 缩放 等
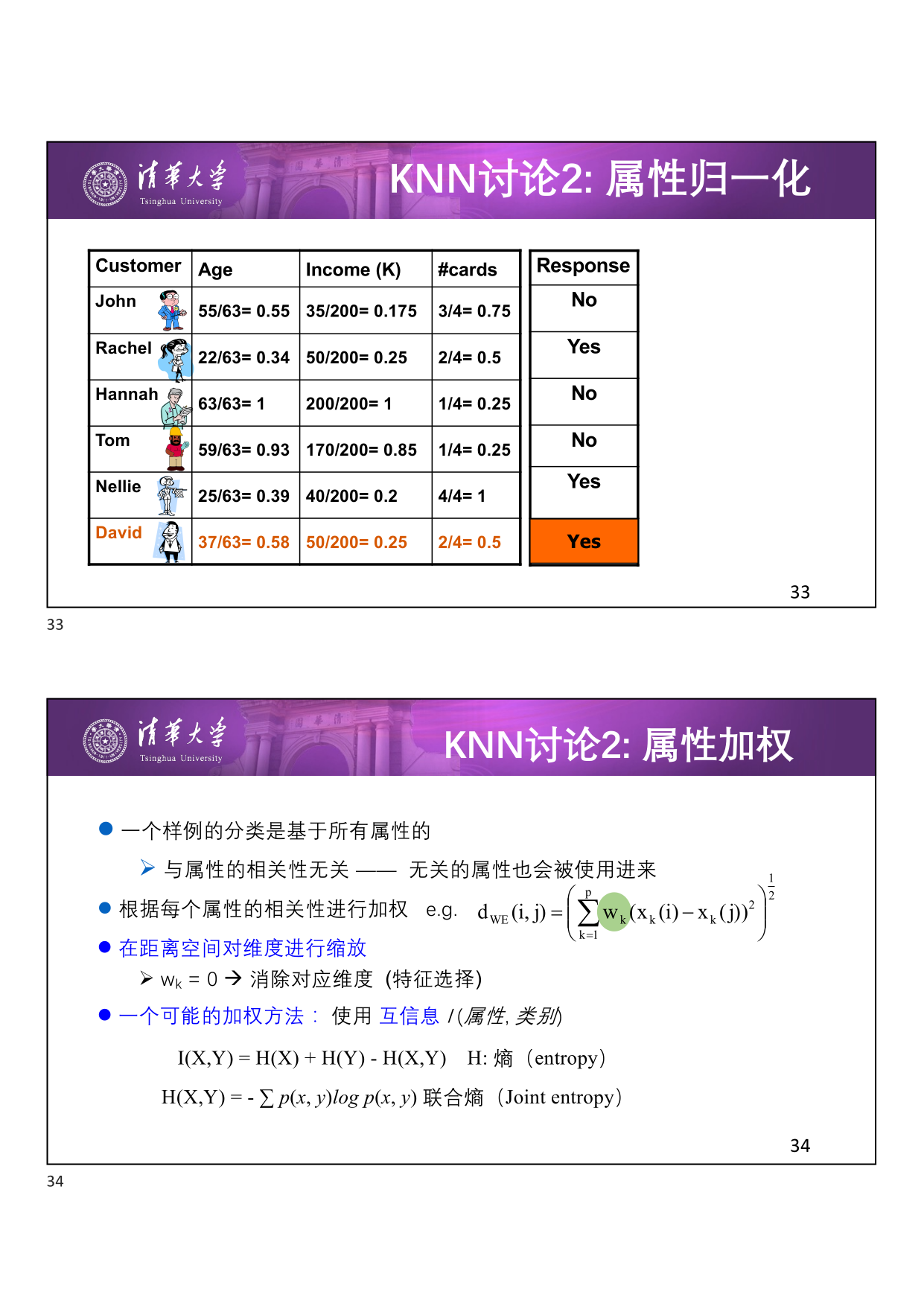
例 3:归一化后的信用评分数据
对信用评分数据进行 Min-Max 归一化:
| Customer | Age | Income (K) | cards | Response |
|---|---|---|---|---|
| John | 55/63 = 0.55 | 35/200 = 0.175 | ¾ = 0.75 | No |
| Rachel | 22/63 = 0.34 | 50/200 = 0.25 | 2/4 = 0.5 | Yes |
| Hannah | 63/63 = 1 | 200/200 = 1 | ¼ = 0.25 | No |
| Tom | 59/63 = 0.93 | 170/200 = 0.85 | ¼ = 0.25 | No |
| Nellie | 25/63 = 0.39 | 40/200 = 0.2 | 4/4 = 1 | Yes |
| David | 37/63 = 0.58 | 50/200 = 0.25 | 2/4 = 0.5 | Yes |
归一化后各属性量纲一致,距离计算不再被收入支配。
5.2 属性加权¶
一个样例的分类是基于所有属性的,但无关的属性也会被计算在内。因此,可以根据每个属性的相关性进行 加权 :
- 基本加权:在距离计算中为不同维度乘以权重 \(w_k\):
- 若 \(w_k = 0\),则等价于消除对应维度( 特征选择 )。
- 互信息 (Mutual Information):一种可能的加权方法,使用属性和类别之间的互信息 \(I(X, Y)\)。

互信息与熵
互信息定义为:
其中 \(H\) 为熵 (entropy),联合熵 (Joint entropy) 为:
6 连续取值目标函数¶
KNN 算法可以处理不同的输出类型:
- 离散输出(分类) :统计 \(k\) 个近邻然后进行 投票 即可。
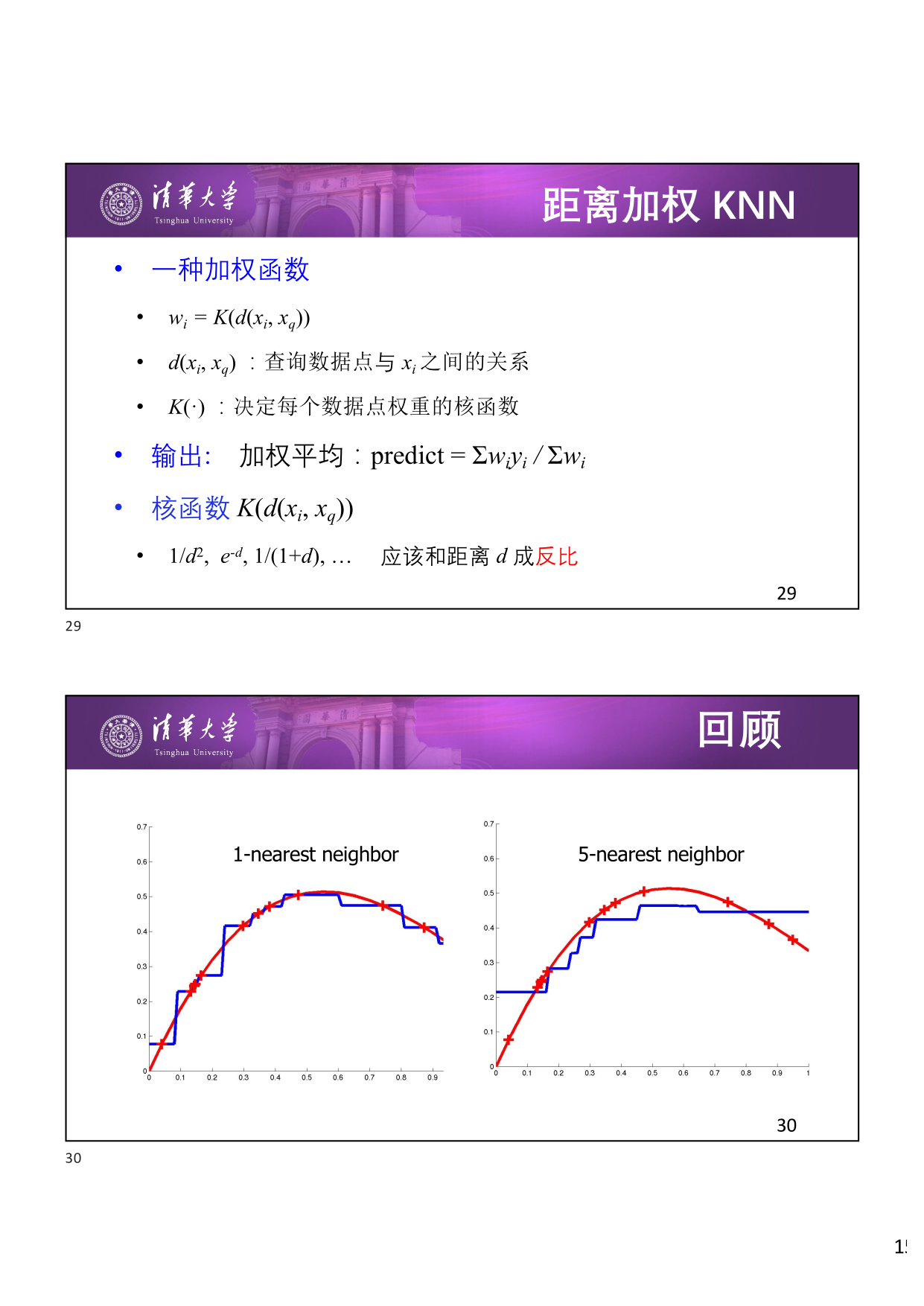
- 连续输出(回归) :计算 \(k\) 个近邻训练样例目标值的 均值 。
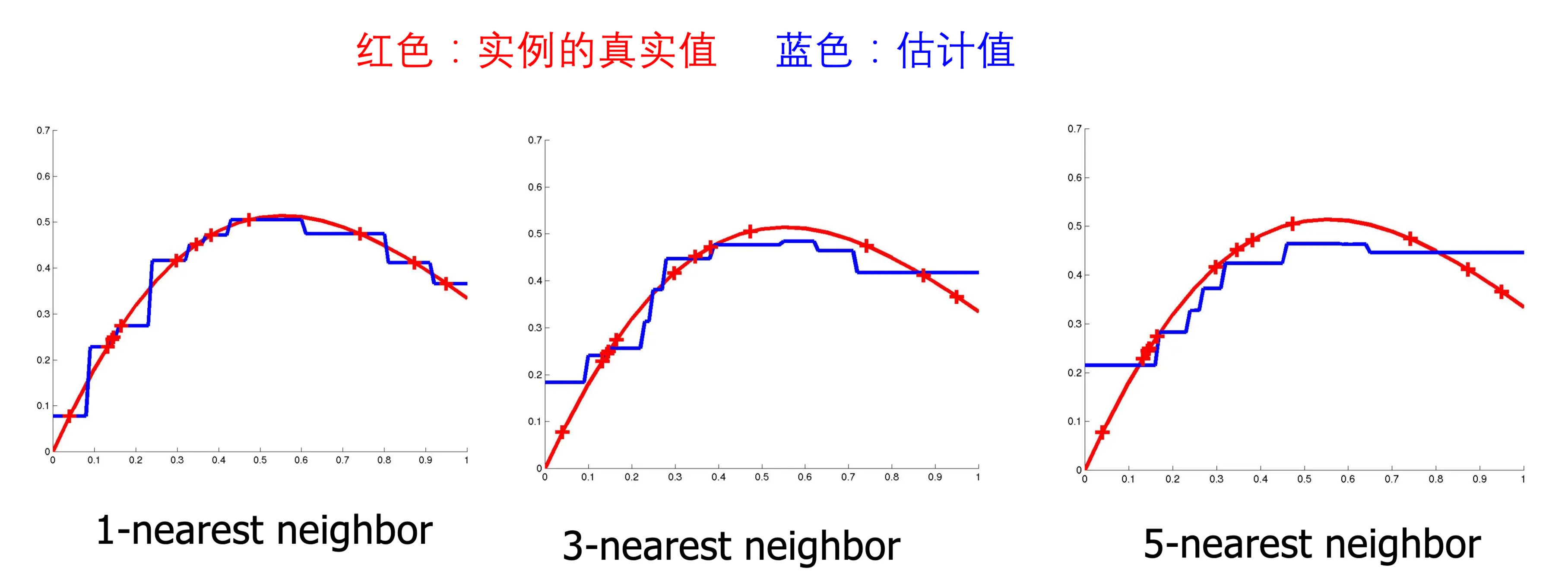
随着 \(k\) 的增加,连续取值的估计曲线会变得更加 平滑 (如上图中 1-NN 拟合较多细节,而 5-NN 更加平滑)。
7 K 的选择与打破平局¶
7.1 K 的选择¶
- 多数情况下 \(k=3\)。
- 通常选取 奇数 ,以防止投票时出现平局。
- 更大的 \(k\) 不一定带来更好的效果,取决于训练样例的数目。
- 实践中常通过 交叉验证 (Cross-validation) 来选择合适的 \(k\)。例如 Leave-one-out :每次拿一个样例作为验证,所有其他的作为训练样例。
KNN 的稳定性
KNN 算法相对稳定,样例中小的噪音或混乱不会对整体结果产生非常大的影响。
7.2 打破平局 (Break Ties)¶
如果出现平局(例如 \(k=3\) 并且每个近邻都属于不同的类,或者票数相同):
- 找一个新的邻居(例如看第 4 个邻居)。
- 取最近的邻居所属的类别。
- 随机选一个。
8 效率与 KD-Tree¶
KNN 算法把所有的计算放在新实例来到时,实时计算开销大。为了加速对最近邻居的选择,可以采用 KD-Tree 数据结构。
- 核心思想 :先检验临近的点,忽略比目前找到的最近点更远的点。
- KD-Tree 是一种基于树的数据结构,递归地将 \(k\) 维数据点划分到和坐标轴平行的方形区域内。
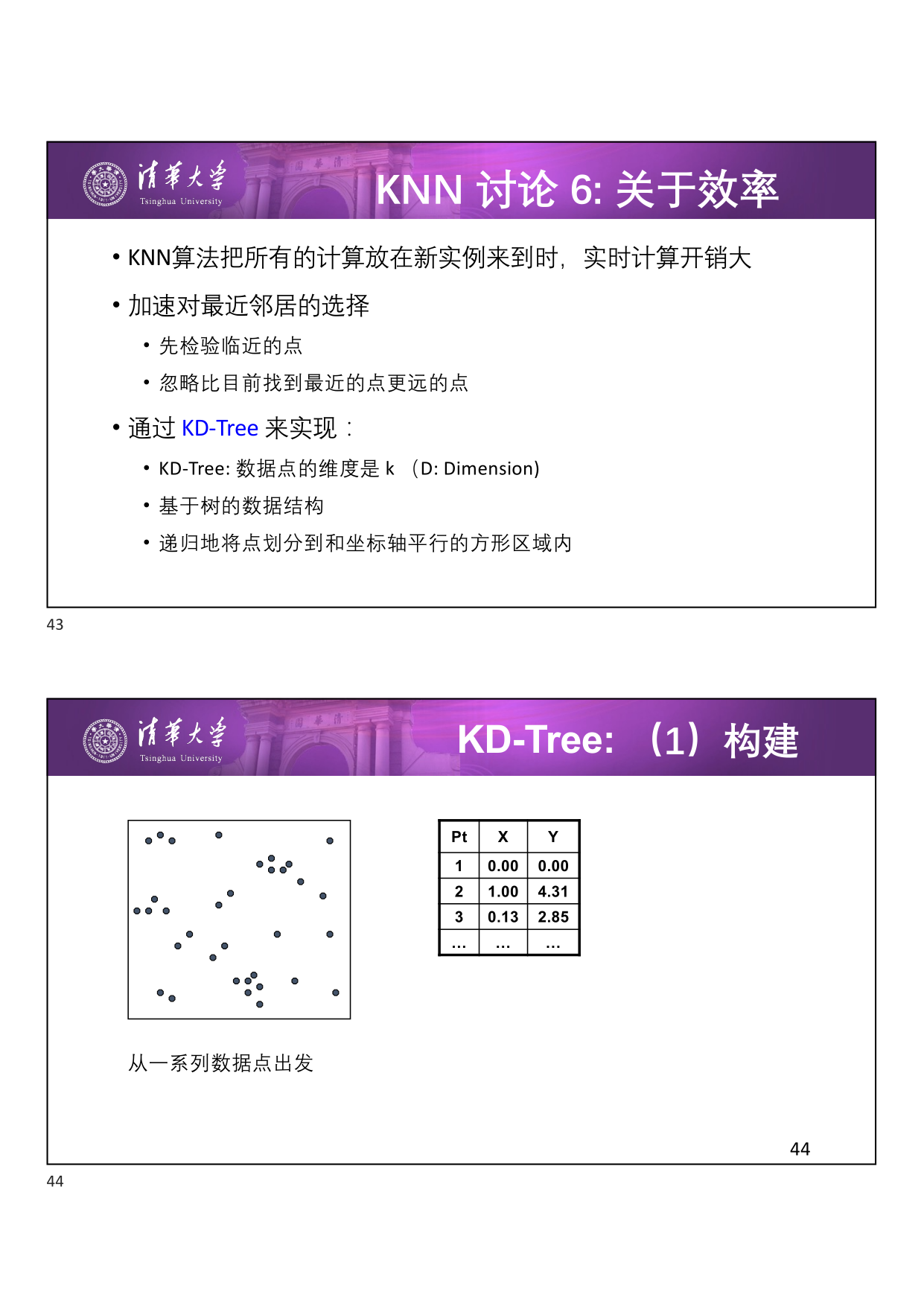
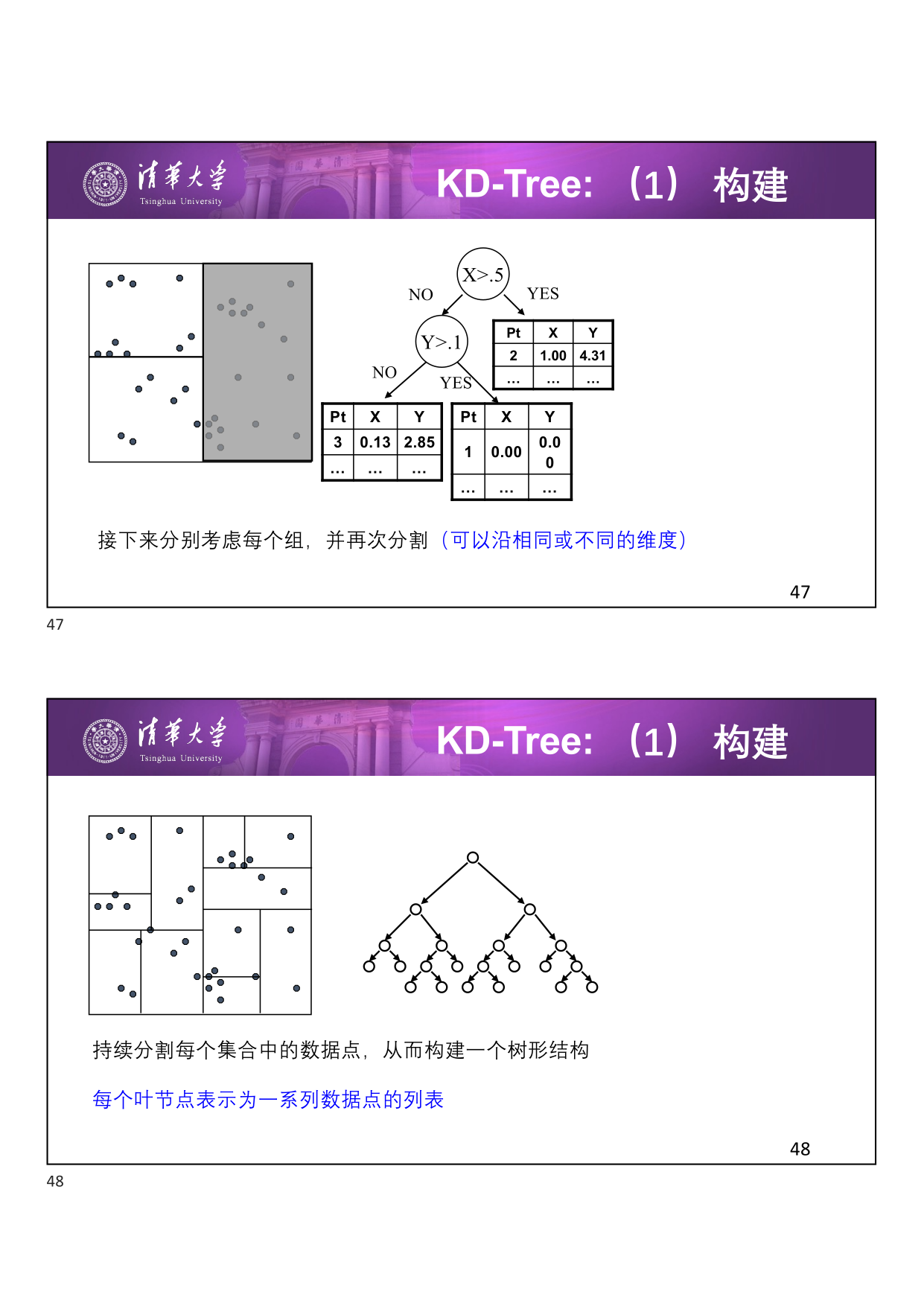
8.1 KD-Tree 的构建¶
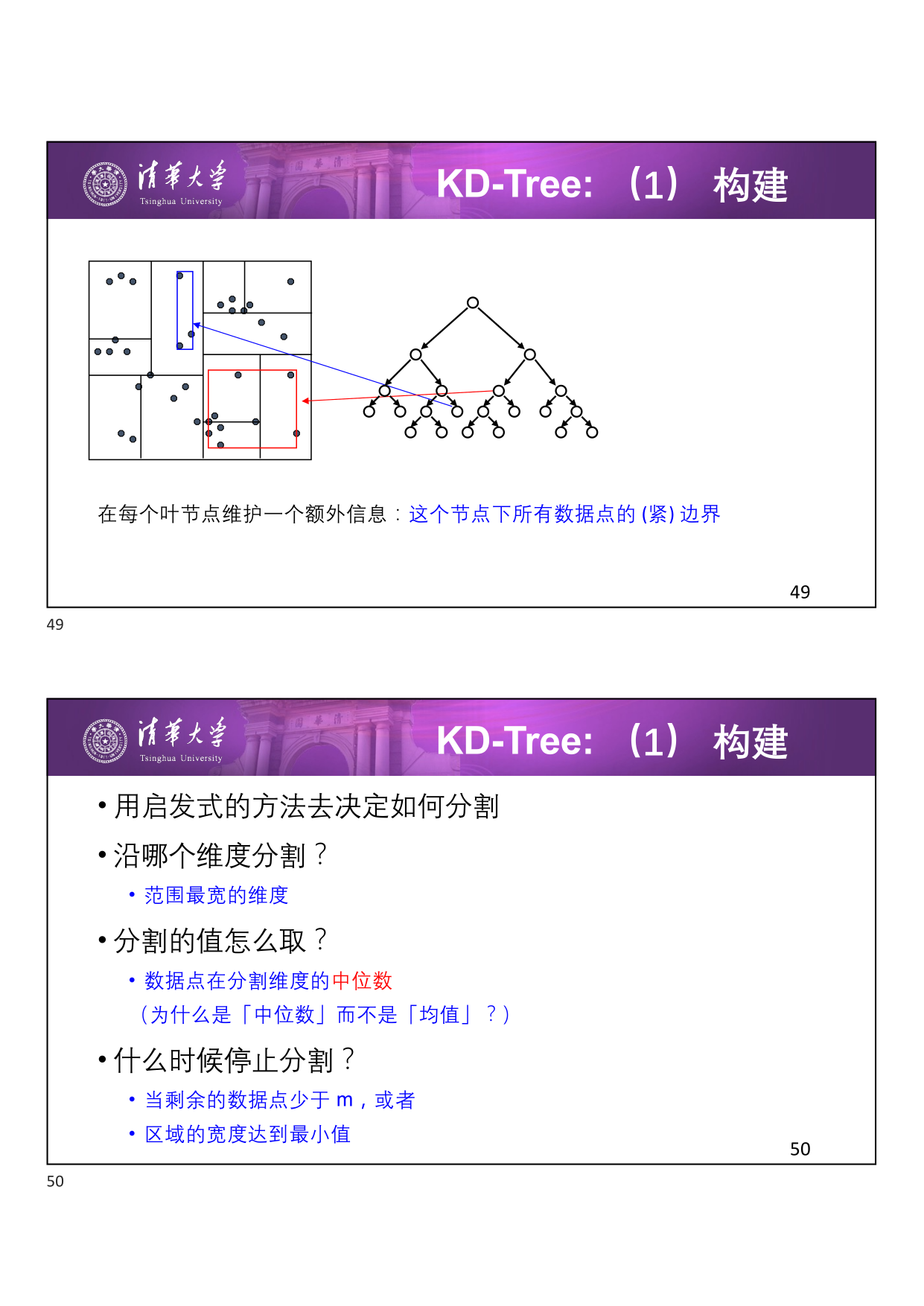
用启发式的方法决定如何分割空间:
- 沿哪个维度分割? 选择范围最宽的维度。
- 分割的值怎么取? 取数据点在该分割维度的 中位数 (保证树的平衡,而非均值)。
- 何时停止分割? 当剩余的数据点少于 \(m\),或者区域的宽度达到最小值。
- 每个叶节点维护一个额外信息:该节点下所有数据点的 紧边界 。
构建过程如下图所示:首先选择一个维度和分界值将数据点分为两组,然后递归地对每组继续分割,最终构建树形结构,每个叶节点是一系列数据点的列表。
8.2 KD-Tree 的查询¶
查询过程分为以下步骤:
Step 1 :遍历树,关注距离查询数据点 最近的分支 。
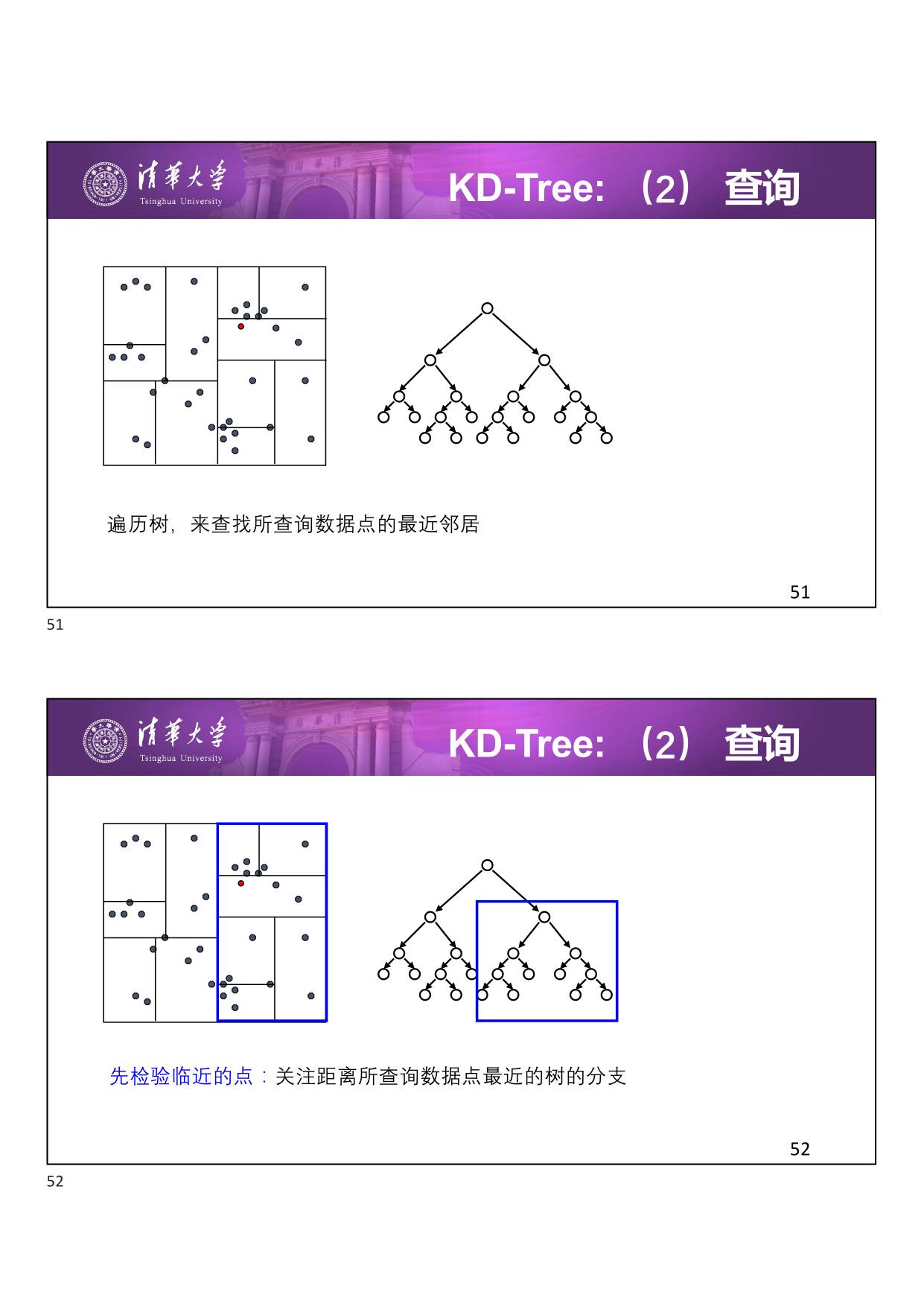
Step 2 :到达叶节点后,计算节点中每个数据点与目标点的距离,并更新当前的 最近距离 (上界)。
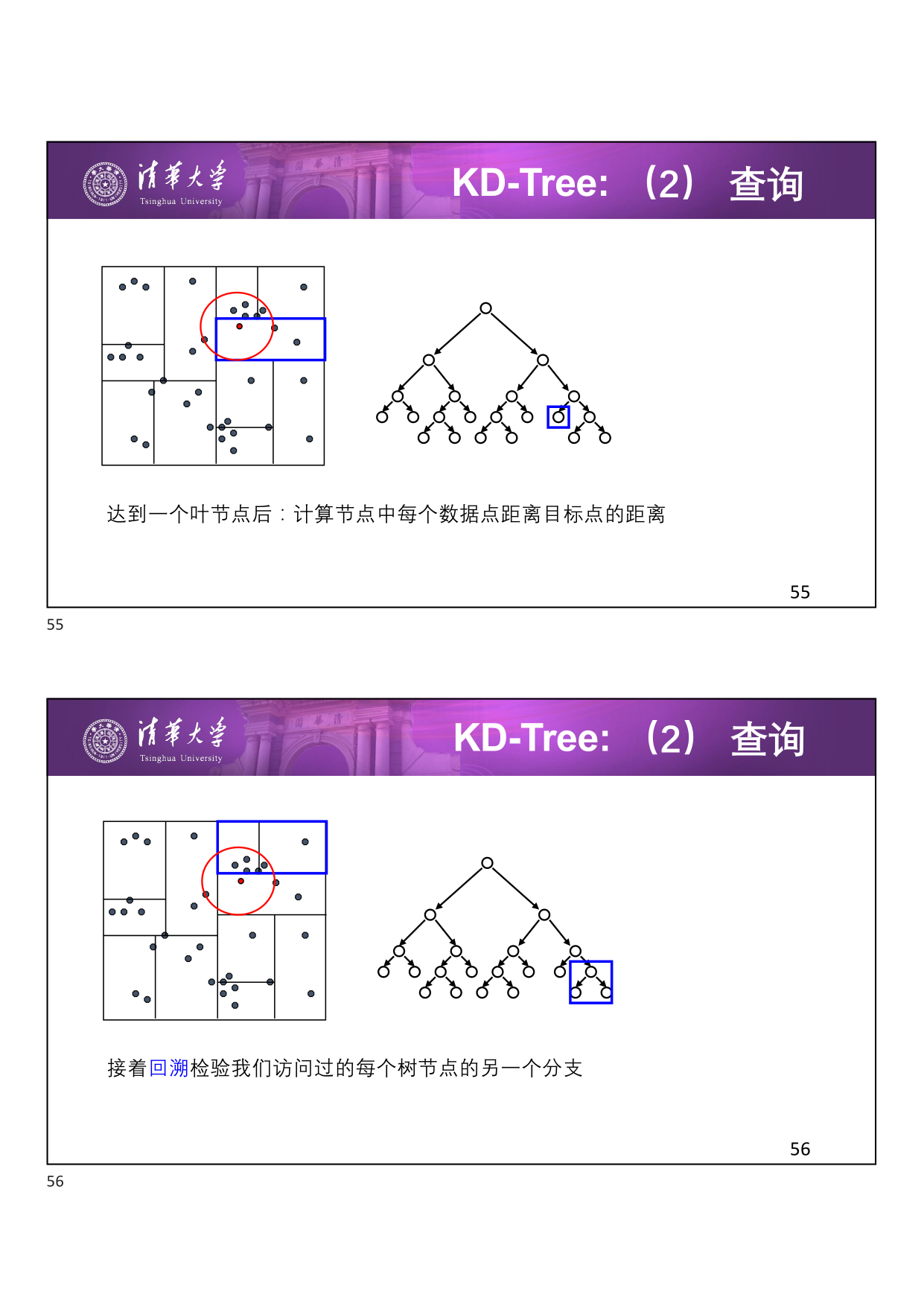
Step 3 :回溯检验访问过的每个树节点的另一个分支。每找到一个更近的点,就更新距离上界。
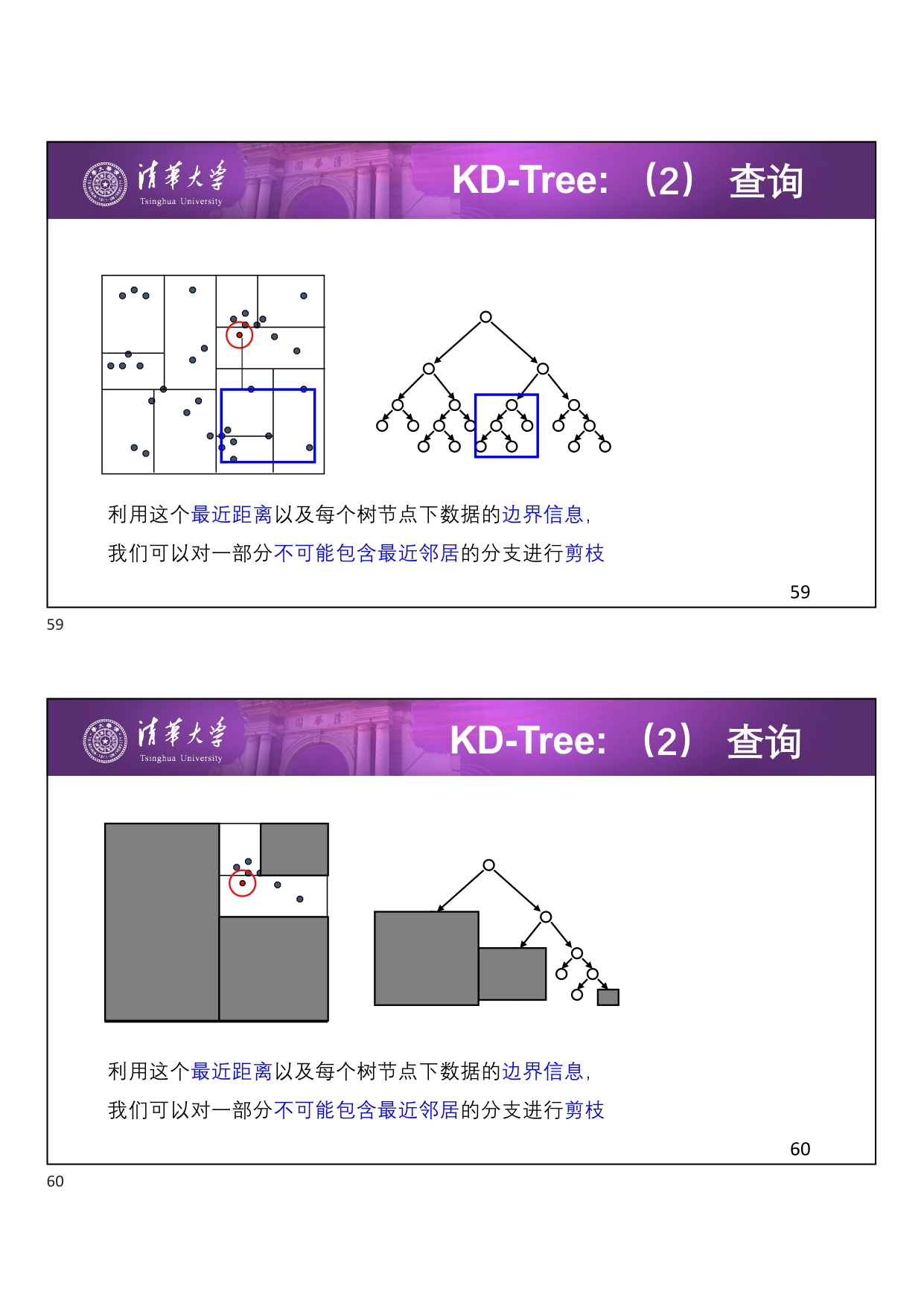
Step 4 :利用当前的最近距离以及每个树节点下数据的边界信息,对不可能包含最近邻居的分支进行 剪枝 。

9 总结¶
KNN 算法的优缺点总结如下:
-
优点 :
- 概念简单,但可以处理复杂问题(如图片分类)和复杂的目标函数。
- 通过对 \(k\) 近邻的平均,对噪声数据更 鲁棒 。
- 容易理解,预测结果可解释(可以展示最近邻居)。
- 训练样例的信息不会丢失(样例本身被显式地存储下来)。
- 实现简单、稳定、除了 \(k\) 之外没有参数。
- 方便进行 Leave-one-out 验证。
-
缺点 :
- 内存开销大 :需要大量空间存储所有样例。通常需存储任意两点距离 \(O(n^2)\),KD-Tree 为 \(O(n \log n)\)。
- CPU 开销大 :分类新样本需要较多时间(因此多用在离线场景)。
- 很难确定合适的距离函数(尤其是复杂符号表示时)。
- 不相关的特征对距离的度量有负面影响。
10 距离加权的 K 近邻算法¶
10.1 动机¶
在标准 KNN 中,\(k\) 个邻居的贡献是 一样的 ——无论它们距离查询点远近,投票权重相同。但直觉上, 更接近 查询数据点的邻居应当赋予 更大的权重 。
10.2 加权函数¶
距离加权 KNN 引入一个 核函数 \(K(\cdot)\) 来决定每个邻居的权重:
其中 \(d(x_i, x_q)\) 为查询数据点与 \(x_i\) 之间的距离,\(K(\cdot)\) 为核函数,应当与距离 \(d\) 成反比 。
输出 为加权平均:
常用的核函数包括:
- \(K(d) = 1 / d^2\)
- \(K(d) = e^{-d}\)
- \(K(d) = 1 / (1 + d)\)
- \(K(d) = e^{-(d/\sigma_0)^2}\)(高斯核)
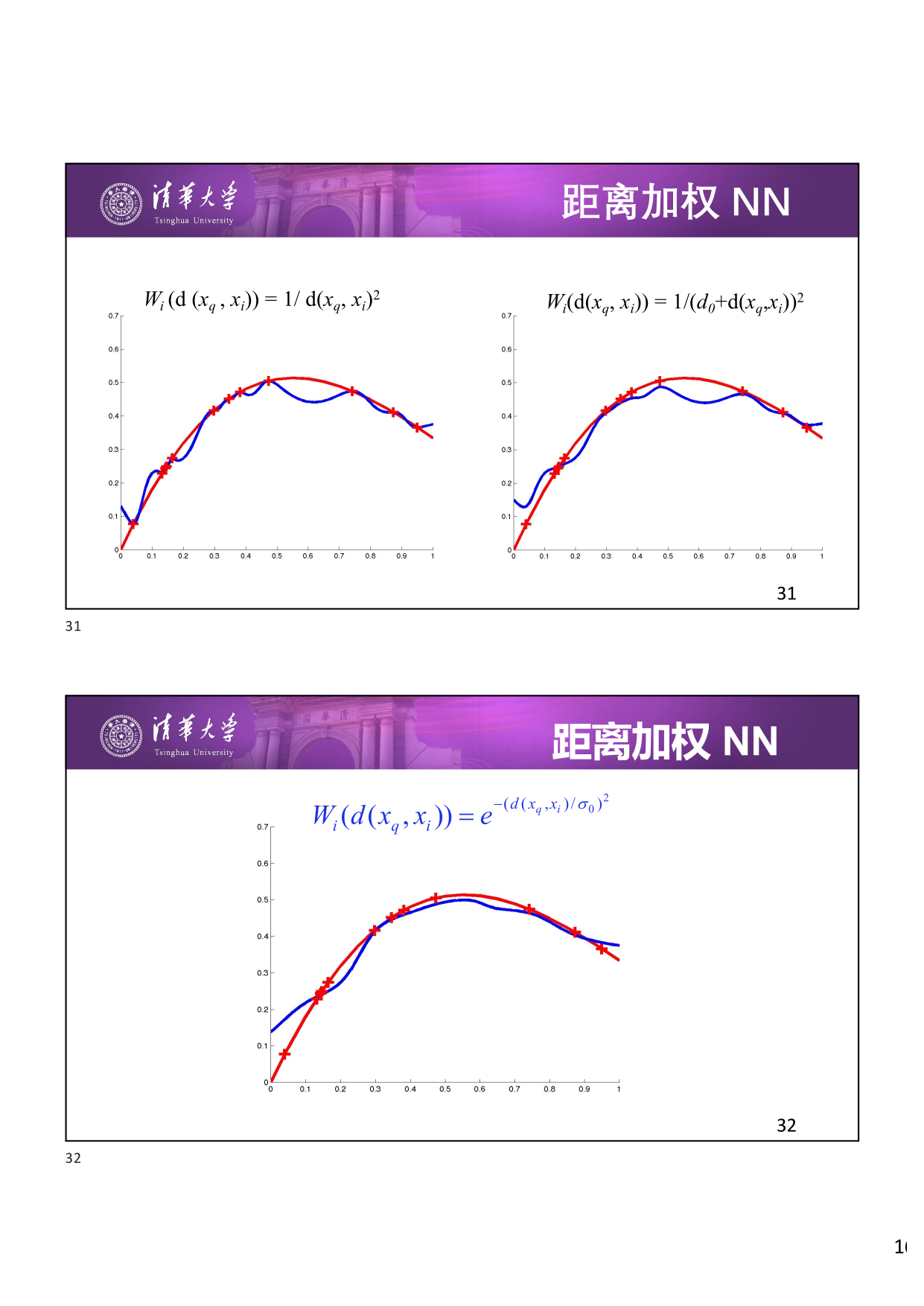
10.3 不同核函数的效果对比¶
下图展示了三种不同核函数在回归任务上的表现:
- \(W_i = 1 / d(x_q, x_i)^2\):简单的距离平方反比
- \(W_i = 1 / (d_0 + d(x_q, x_i))^2\):加入平滑常数 \(d_0\) 避免距离为零时的奇异性
- \(W_i = e^{-(d(x_q, x_i) / \sigma_0)^2}\):高斯核,效果更加光滑
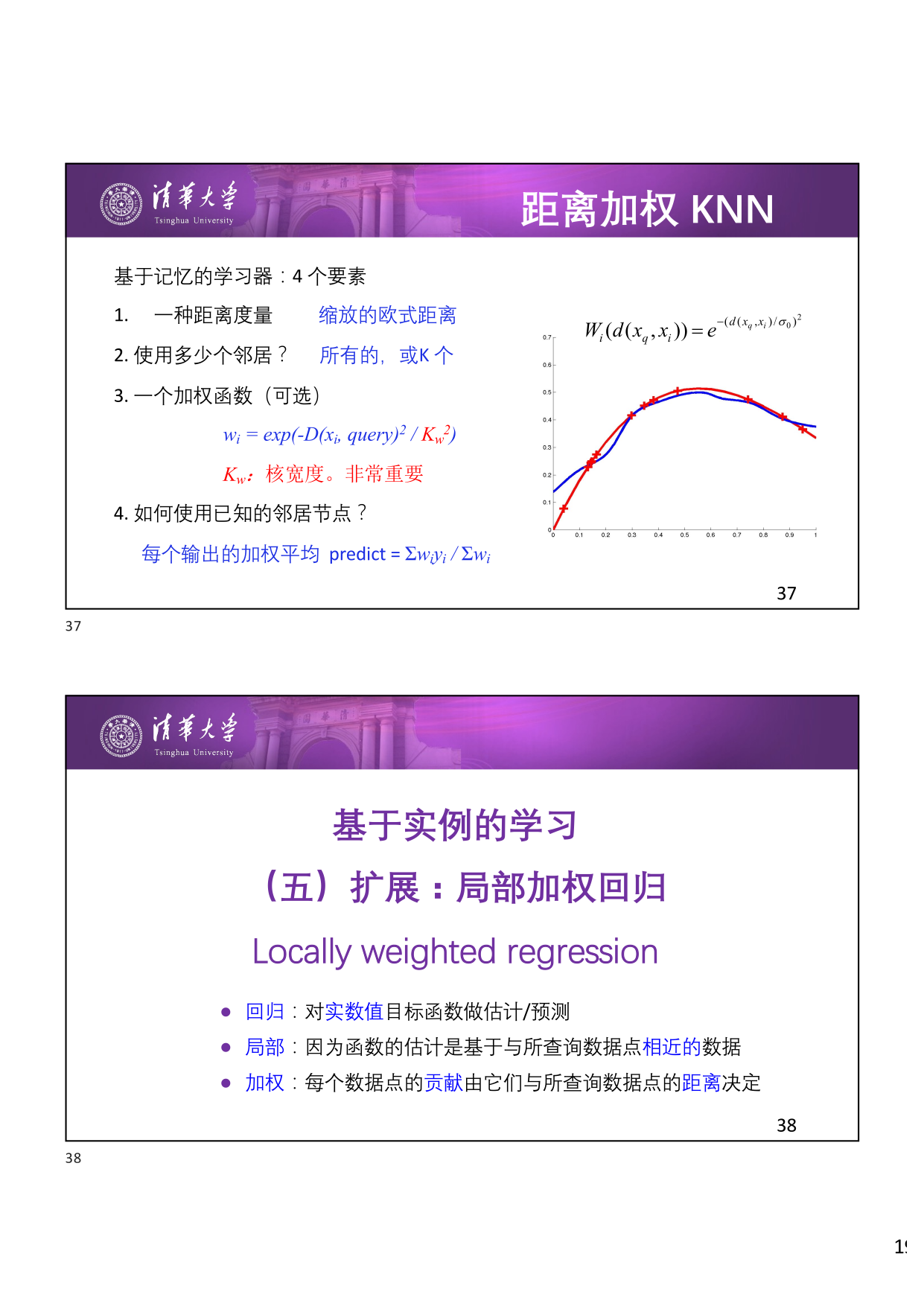
10.4 距离加权 KNN 的四要素描述¶
用基于记忆的学习器的四要素框架来描述距离加权 KNN:
- 距离度量 :缩放的欧式距离
- 使用多少个邻居 :所有的,或 \(K\) 个
- 加权函数 :\(w_i = \exp(-D(x_i, \text{query})^2 / K_w^2)\),其中 \(K_w\) 为 核宽度 ,非常重要
- 如何使用邻居 :每个输出的加权平均 \(\hat{y} = \sum w_i y_i / \sum w_i\)
11 基于实例的学习器的四个要素¶
所有基于实例(记忆)的学习器都可以用以下 四个要素 来刻画:
- 一种 距离度量
- 使用多少个 邻居 ?
- 一个 加权函数 (可选)
- 如何使用已知的 邻居节点 ?
不同算法在四要素框架下的对比:
| 要素 | 1-NN | K-NN | 距离加权 KNN | 局部加权回归 |
|---|---|---|---|---|
| 距离度量 | 欧式距离 | 欧式距离 | 缩放的欧式距离 | 缩放的欧式距离 |
| 邻居数量 | 1 个 | \(K\) 个 | 所有的或 \(K\) 个 | 所有的或 \(K\) 个 |
| 加权函数 | 无 | 无 | \(w_i = \exp(-D^2 / K_w^2)\) | \(w_i = \exp(-D^2 / K_w^2)\) |
| 使用方式 | 与邻居相同 | \(K\) 个邻居投票 | 加权平均 | 构建局部线性模型 |
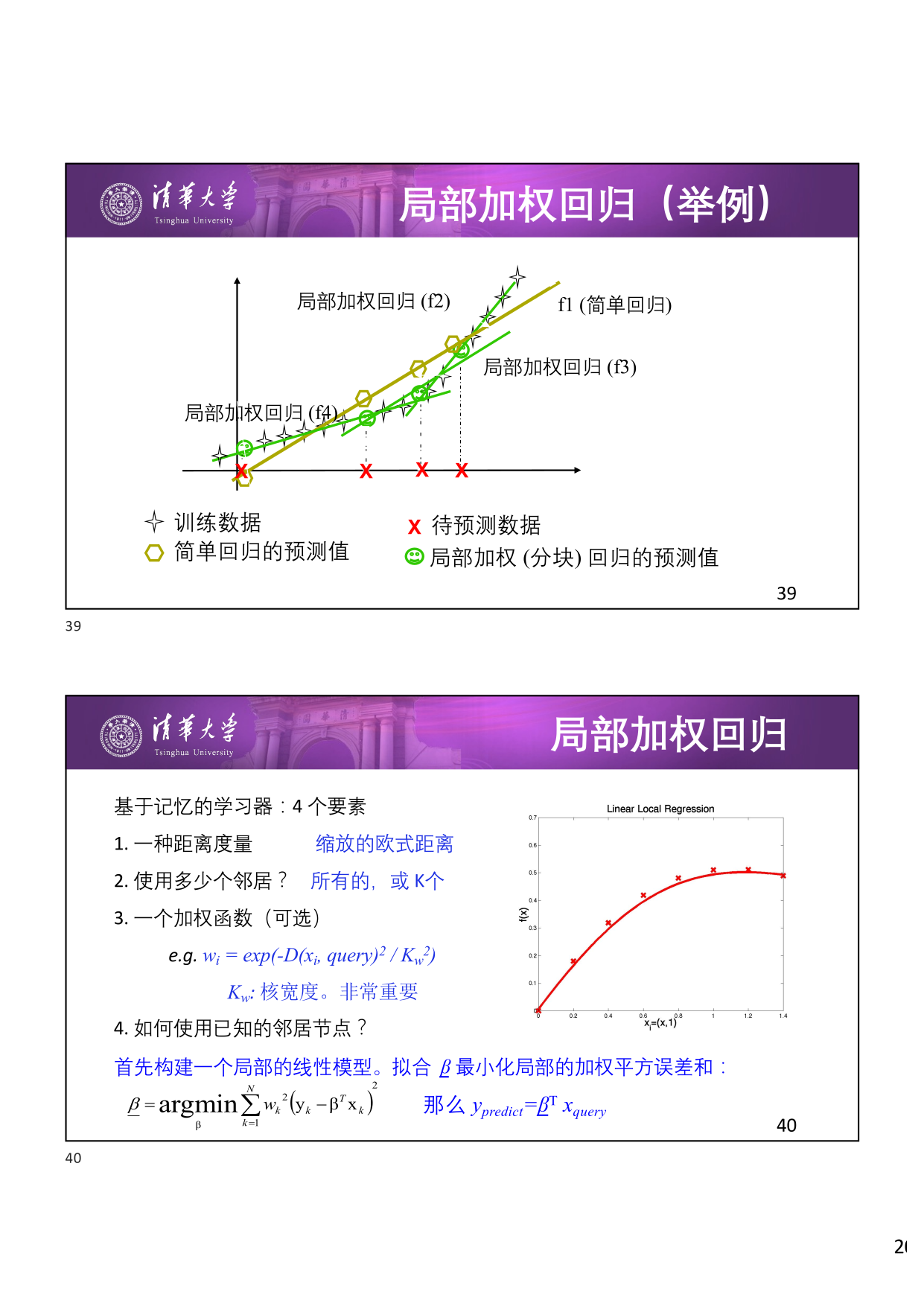
12 局部加权回归¶
12.1 基本思想¶
局部加权回归 (Locally Weighted Regression) 是基于实例学习的进一步扩展:
- 回归 (Regression):对 实数值 目标函数做估计/预测
- 局部 (Local):函数的估计是基于与查询数据点 相近 的数据
- 加权 (Weighted):每个数据点的贡献由它们与查询数据点的 距离 决定
与距离加权 KNN 的区别在于第四个要素——局部加权回归不是简单地对邻居取加权平均,而是在查询点附近 构建一个局部线性模型 。
12.2 算法¶
给定查询点 \(x_q\),拟合参数 \(\beta\) 以最小化局部的加权平方误差和:
其中权重 \(w_i = \exp(-D(x_i, \text{query})^2 / K_w^2)\),\(K_w\) 为核宽度。
预测值为:
核宽度的选择
核宽度 \(K_w\) 的选择非常重要,不仅是对核回归,对 所有局部加权学习器 都很重要。\(K_w\) 太小会导致过拟合和抖动,\(K_w\) 太大会导致欠拟合。
13 真实数据上不同算法的表现对比¶
以下展示了在三组不同特征的真实测试数据上,各种算法的表现:
13.1 线性回归¶
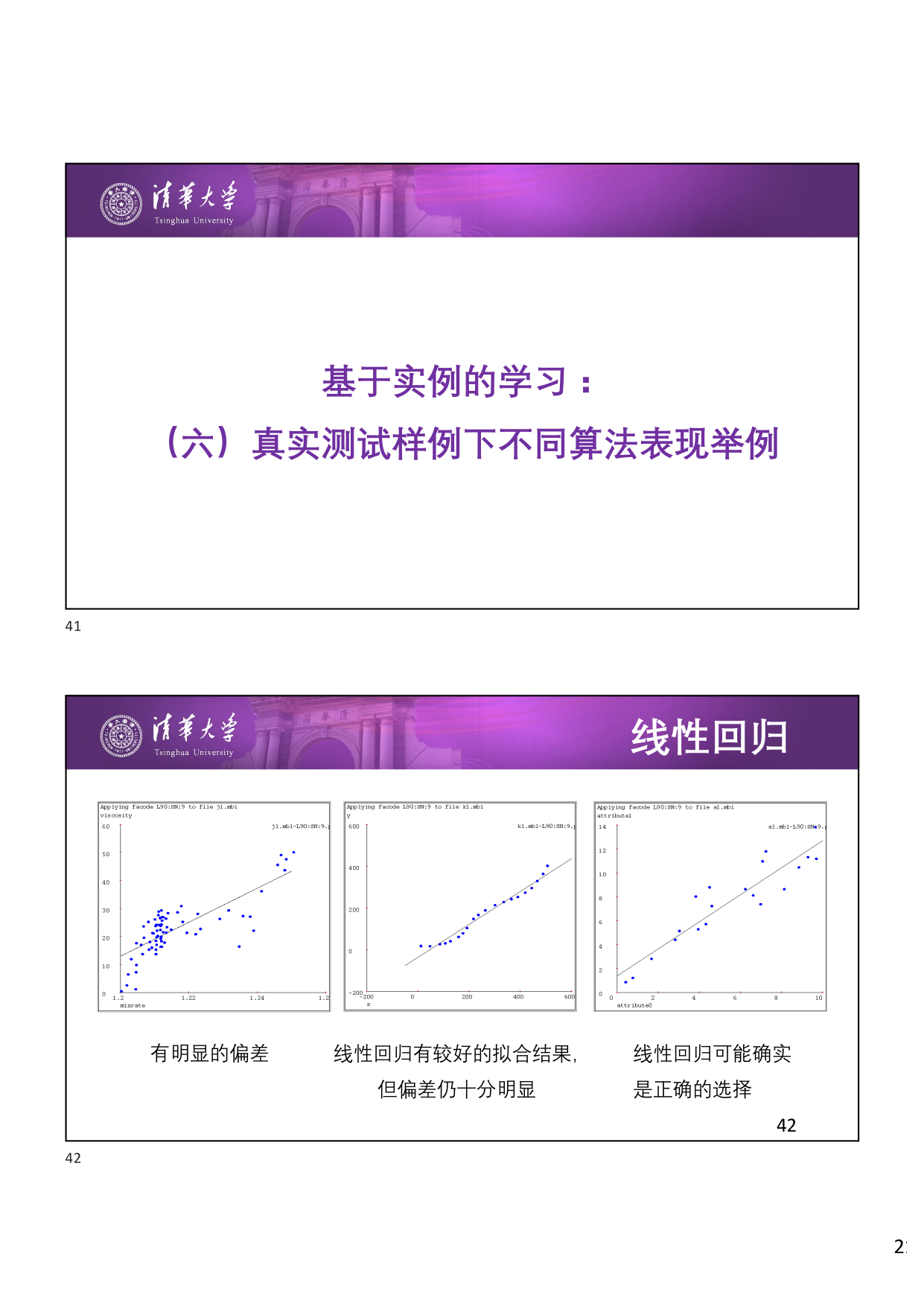
- 数据 1:有明显的偏差
- 数据 2:线性回归有较好的拟合结果,但偏差仍十分明显
- 数据 3:线性回归可能确实是正确的选择
13.2 连接所有点 & 1-近邻¶
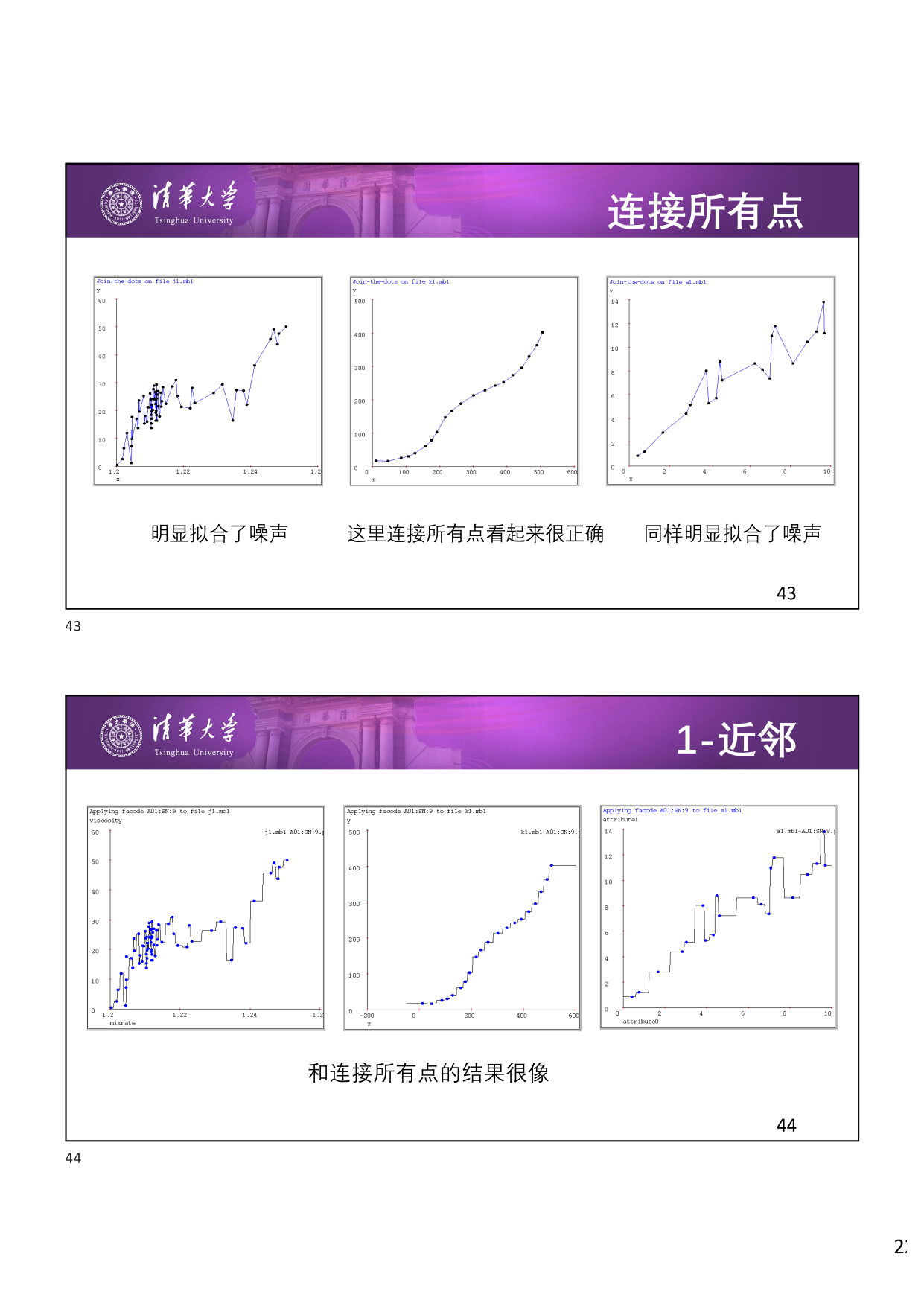
- 连接所有点 :明显拟合了噪声(数据 1、3),只在数据 2 上看起来很正确
- 1-近邻 :和连接所有点的结果很像,同样容易拟合噪声
13.3 K-近邻 (K=9) & 距离加权 KNN¶
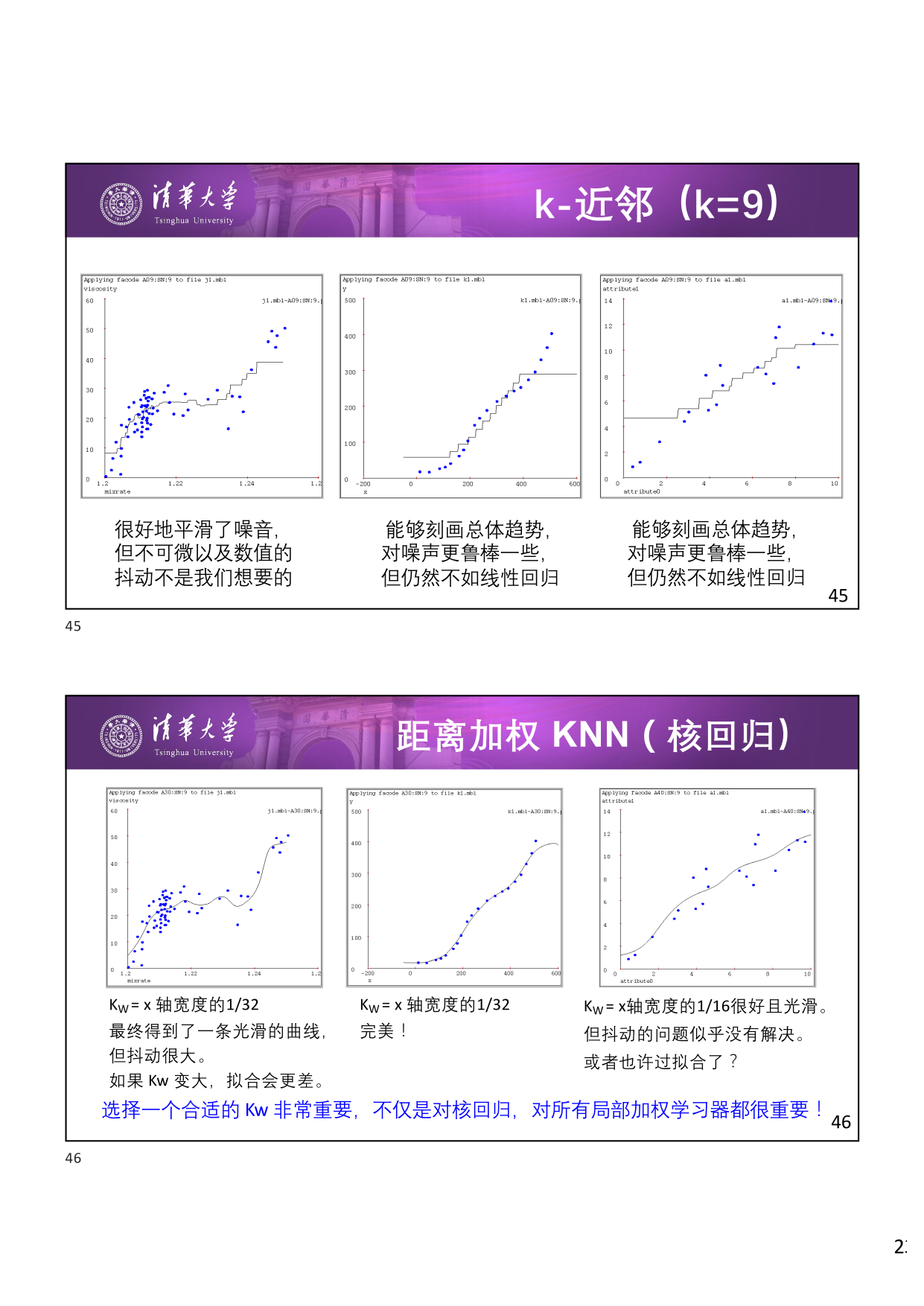
- K-近邻 (K=9) :很好地平滑了噪音,能够刻画总体趋势,对噪声更鲁棒。但曲线不可微且有数值抖动
- 距离加权 KNN(核回归) :
- \(K_w\) = x 轴宽度的 1/32:得到光滑曲线,但抖动很大
- \(K_w\) 的选择非常重要:太小抖动大,太大拟合差
13.4 局部加权回归¶
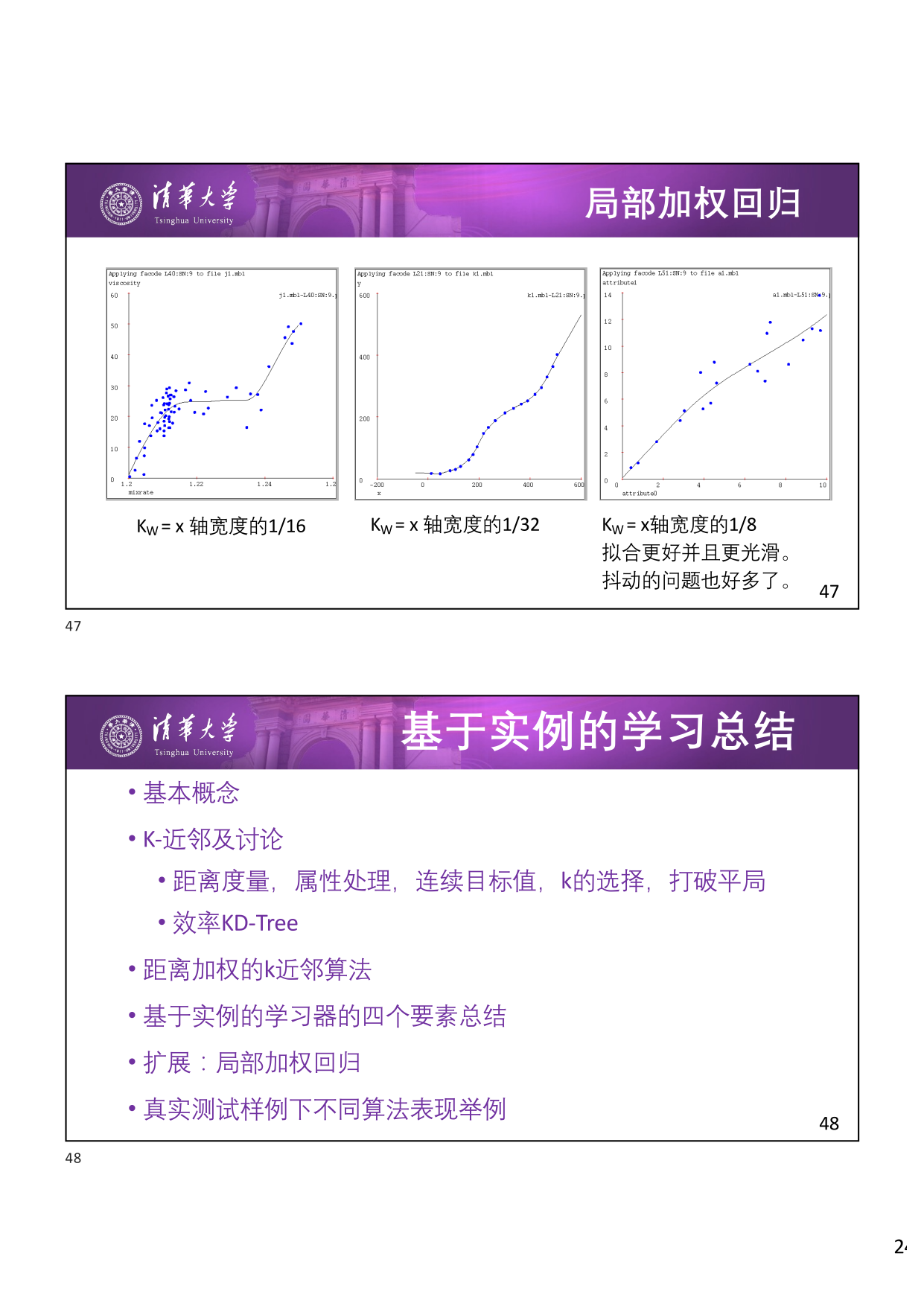
- \(K_w\) = x 轴宽度的 ⅛:拟合更好并且更光滑,抖动的问题也好多了
- 总体上,局部加权回归在多种数据特征下表现 最稳定 ,兼顾了光滑性和拟合精度